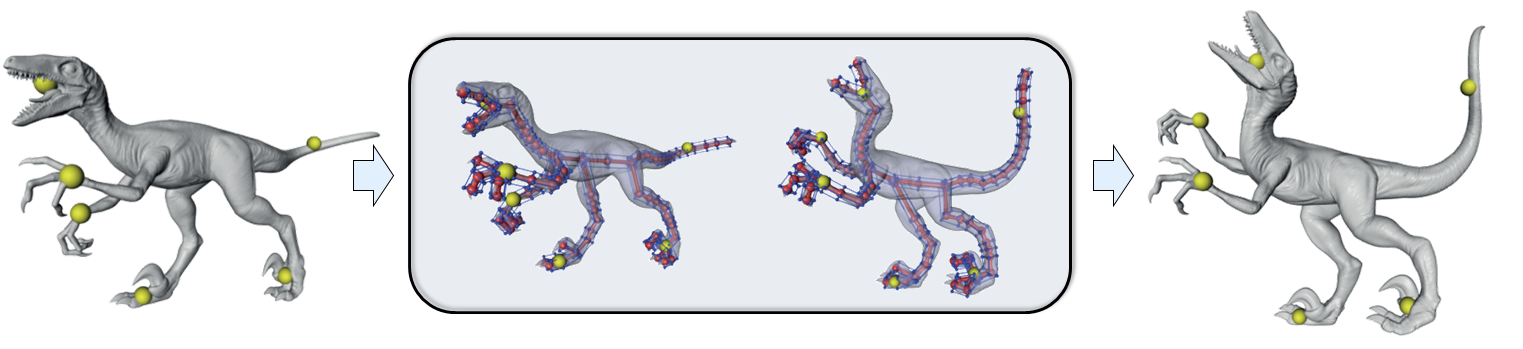
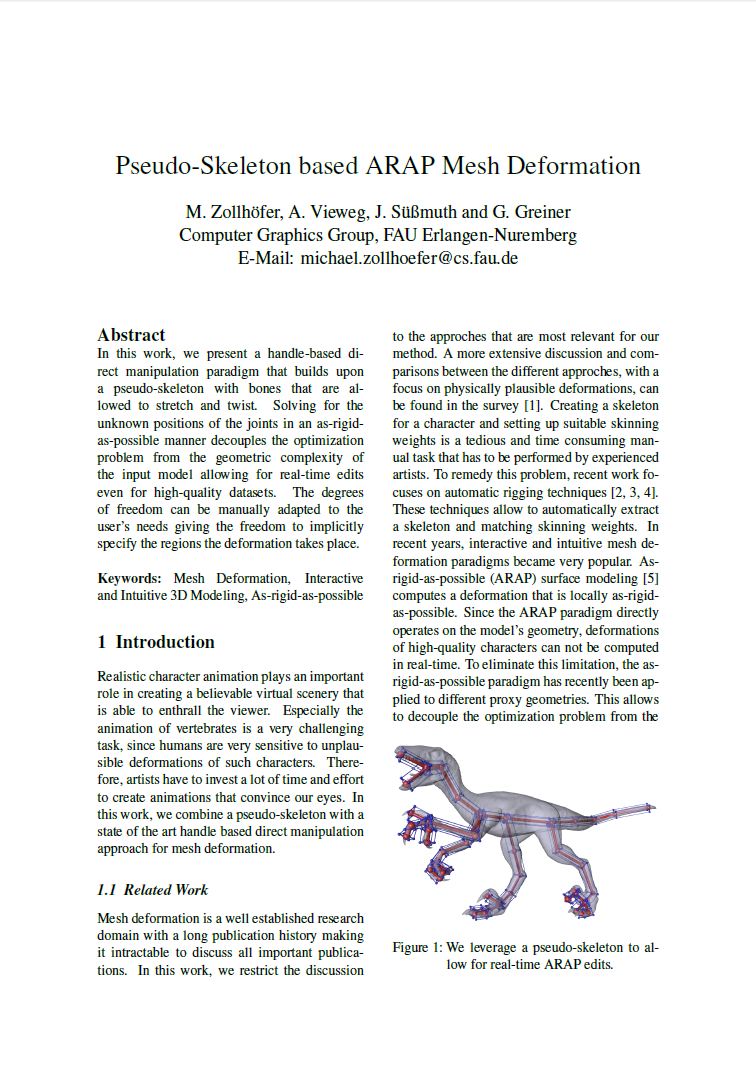
In this work, we present a handle-based direct manipulation paradigm that builds upon a pseudo-skeleton with bones that are allowed to stretch and twist. Solving for the unknown positions of the joints in an as-rigid-as-possible manner decouples the optimization problem from the geometric complexity of the input model allowing for real-time edits even for high-quality datasets. The degrees of freedom can be manually adapted to the user’s needs giving the freedom to implicitly specify the regions the deformation takes place.