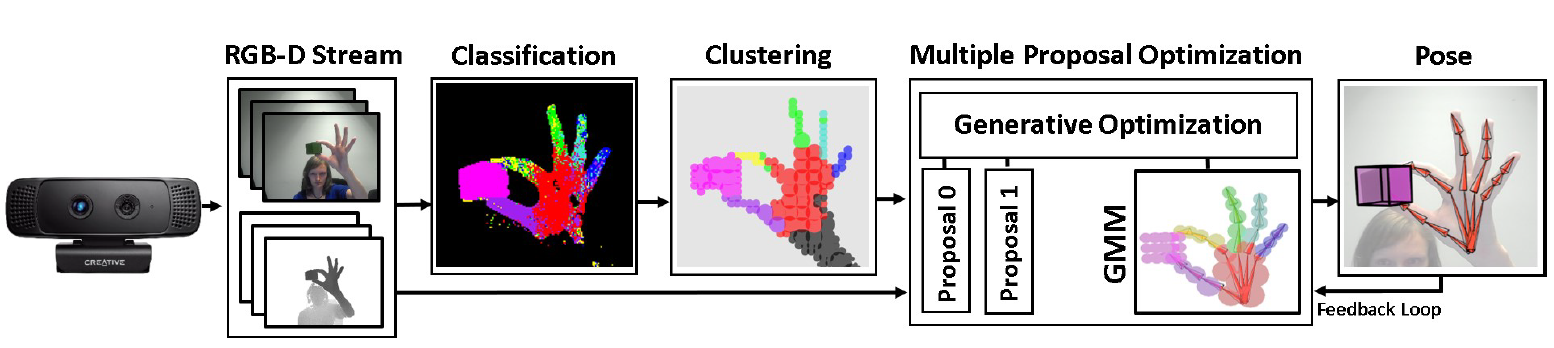
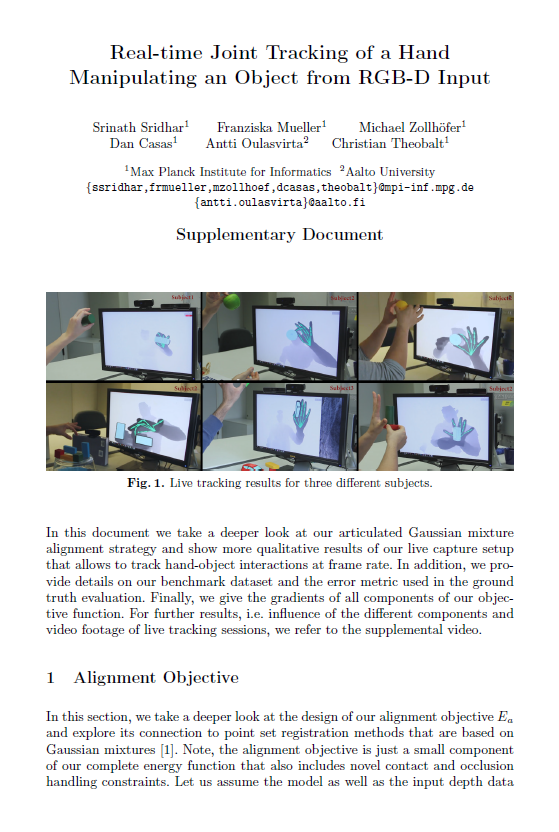
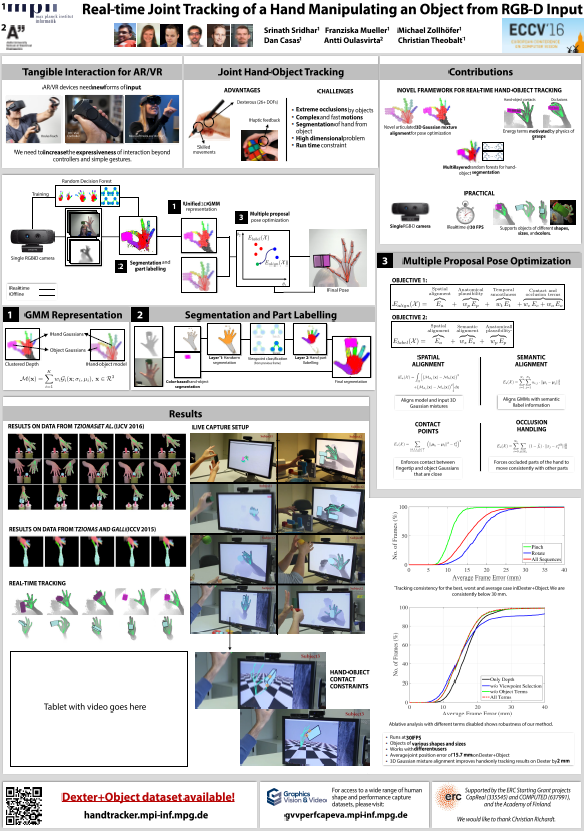
Real-time simultaneous tracking of hands manipulating and interacting with external objects has many potential applications in augmented reality, tangible computing, and wearable computing. However, due to difficult occlusions, fast motions, and uniform hand appearance, jointly tracking hand and object pose is more challenging than tracking either of the two separately. Many previous approaches resort to complex multi-camera setups to remedy the occlusion problem and often employ expensive segmentation and optimization steps which makes real-time tracking impossible. In this paper, we propose a real-time solution that uses a single commodity RGB-D camera. The core of our approach is a 3D articulated Gaussian mixture alignment strategy tailored to hand-object tracking that allows fast pose optimization. The alignment energy uses novel regularizers to address occlusions and hand-object contacts. For added robustness, we guide the optimization with discriminative part classification of the hand and segmentation of the object. We conducted extensive experiments on several existing datasets and introduce a new annotated hand-object dataset. Quantitative and qualitative results show the key advantages of our method: speed, accuracy, and robustness.
@article{RealtimeHO_ECCV2016, title = {{Real-time Joint Tracking of a Hand Manipulating an Object from RGB-D Input}}, author = {Sridhar, Srinath and Mueller, Franziska and Zollhoefer, Michael and Casas, Dan and Oulasvirta, Antti and Theobalt, Christian}, booktitle = {Proceedings of European Conference on Computer Vision ({ECCV})}, numpages = {17}, month = {October}, year = {2016} }